Questa è una mini guida su come parametrare il firmware SkyNet3d/Marlin associato all’uso di un sensore di auto livellamento su una stampante 3D Anet A8.
Si suppone che il vostro sensore sia correttamente posizionato ed collegato in modo corretto.
Si suppone che i driver (CH340) della stampante siano già correttamente installati.
Collegate la vostra stampante al PC attraverso un cavo usb e accendetela.
Scaricate il firmware SkyNet o meglio ancora Marlin (che ormai include i file di configurazione della Anet A8/A6):
https://github.com/MarlinFirmware/Marlin
http://marlinfw.org/
https://www.facebook.com/skynet3ddevelopment/
https://github.com/SkyNet3D
or
https://github.com/thijsk/Skynet3d
Scompattate la cartella dello ZIP che avete scaricato.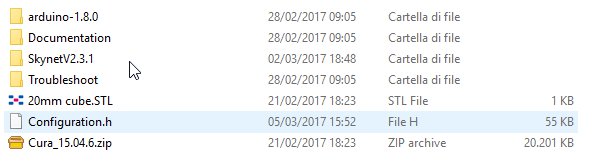
Navigate nella cartella SkenetV2.3.1 -> Configuration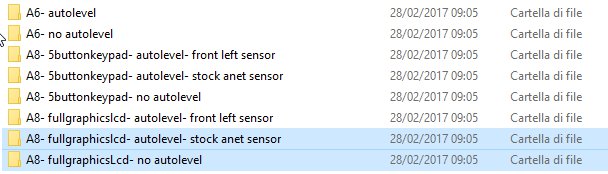
e scegliete la configurazione che corrisponde alla vostra, aprite la cartella corrispondente. Selezionate e copiate il file Configuration.h
Tornate alla radice della cartelle SkenetV2.3.1 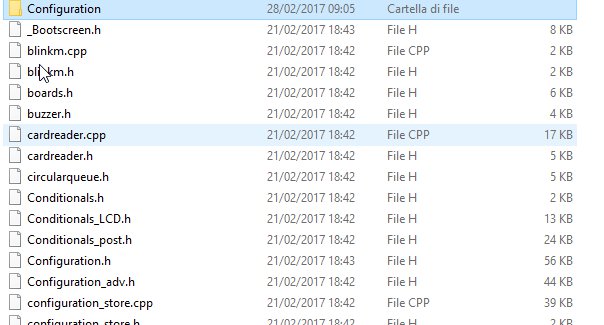
e incollate il file Configuration.h che avete precedentemente copiato. Sovrascrivendo quello esistente.
lanciate il programma arduino che trovate nella cartella arduin0-1.8.0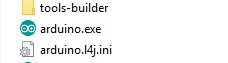
Dal IDE arduino aprite
il file Marlin.ino o SkynetV2.3.1.ino che trovate all’interno della cartella SkynetV2.3.1
Cercate il Tab Configuration.h

Fate Ctrl+F e cercate: //Probe offsets

Ora dovete controllare che la distanza del centro del vostro sensore al centro del nozzle corrisponda a ciò che è inserito nel codice del firmware.
Misurate con un calibro.
Modificate le linee:
#define X_PROBE_OFFSET_FROM_EXTRUDER
e
#define Y_PROBE_OFFSET_FROM_EXTRUDER
in funzione alle vostre misure. Le cifre sono espresse in millimetri.
Se il vostro sensore è posizionato davanti a sinistra rispetto al nozzle i numeri dovranno essere in negativo. Se è davanti a destra X sara negativo e Y sarà positivo, ecc.
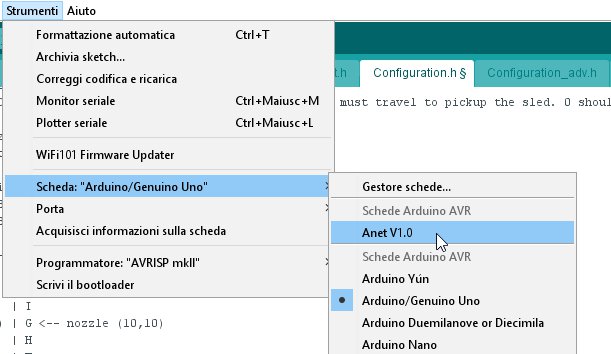
Ora nell’IDE arduino selezionate come scheda: Anet v1.0
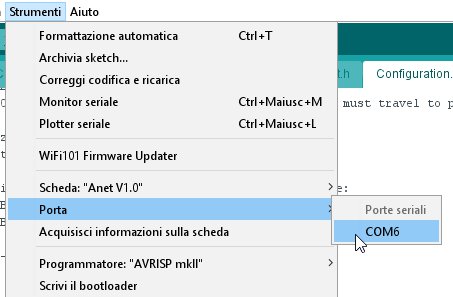
e la porta seriale dove è collegata le vostra stampante
ora compilate e caricate il nuovo firmware sulla vostra carta
Se tutto è andato per il verso giusto la vostra stampante dovrebbe avere un nuovo Firmware e essere pronto per impostare l’auto livellamento:
https://research.paolorudelli.com/2017/03/07/calibrare-il-sensore-di-autolivellamento-induttivo-con-skynetmarlin-e-repetier-host/
per altri parametri, quali mm/steps, accelerazione ecc. vi consiglio di usare l’interfaccia di repetier host fino a che non avete preso confidenza con il firmware SkyNet/Marlin.
Per ogni aiuto scrivete sul gruppo FaceBook:
https://www.facebook.com/groups/608564376013968
PS: Se vi serve il boot loader per la scheda Anet potete scaricarlo qui:
https://github.com/SkyNet3D/anet-board
Vi consiglio di installare la versione Optiboot che usa meno memoria
One reply on “Come impostare il firmware SkyNet/Marlin per l’uso dell’auto sensore su una stampante ANET”
[…] alimentato con la giusta tensione e funzionante e inoltre che il vostro firmware skynet/marlin sia correttamente configurato per il vostro sensore e in funzione a dove quest’ultimo è posizionato rispetto al […]